| **Zielgruppe** | **Dauer** | **Level** | **Gruppengröße** |
| ab 10 Jahren | 5 bis 10 Stunden | 3 | 3 TN's |
**Ziele** *- Grundlagen von Stromkreisläufen vermitteln* *- MicroPython vermitteln* *- Teamarbeit fördern* *- algorithmisches Denken stärken* *- ethische Aspekte digitaler Technologien reflektieren*
| **Material** | **Werkzeug** |
| - Raspberry Pi Pico Set - Breadboard - Jumper, Dupont Kabel Set - MP3-DFPlayer - Lausprecher 3W 8Ohm - Bewegungssensor (PRI-Sensor) | - Lötstation/-set - Zangenset - Sortier-/Projektbox |
| Thonny | [https://thonny.org/](https://thonny.org/) |
| Micropython | [https://micropython.org/](https://micropython.org/) |
Während der Installation oder dem Laden von MicroPython auf das Raspberry Pi Pico trennt sich das Laufwerk automatisch vom Computer. Dies zeigt an, dass die Installation abgeschlossen ist. Zieht auf keinen Fall das Kabel während dieses Prozesses vom Pico ab, da dies die Installation unterbrechen und zu Fehlern führen könnte. Sicherheit geht vor – lasst das Pico in Ruhe arbeiten! (˶ᵔ ᵕ ᵔ˶)
[](https://wiki.gestaltwasdigital.org/uploads/images/gallery/2024-11/pico-click-v2.gif) **Mit Thonny ein Programm auf dem Raspberry Pi Pico speichern/laden** Nachdem ihr Thonny geöffnet habt, könnt ihr über das Menü die Option **Dateien/Files** auswählen, um Dateien zu verwalten. - Mit der Option **Öffnen/Open** öffnet sich ein Dialog, in dem ihr auswählen könnt, ob ihr eine Datei von eurem Computer oder direkt vom Raspberry Pi Pico laden möchtet. - Mit der Option **Speichern/Save** öffnet sich ein Dialog, in dem ihr auswählen könnt, wo ihr euer Programm speichern möchtet – entweder auf dem Computer oder auf dem Raspberry Pi Pico. So könnt ihr eure Programme einfach verwalten und sicherstellen, dass sie immer an der richtigen Stelle gespeichert sind!Achtet beim Speichern auf dem Raspberry Pi Pico darauf, dass die Datei den Namen **main.py** hat. Nur mit diesem Dateinamen erkennt das Pico euer Programm automatisch und führt es nach dem Starten aus. ᓚ₍ ^. .^₎
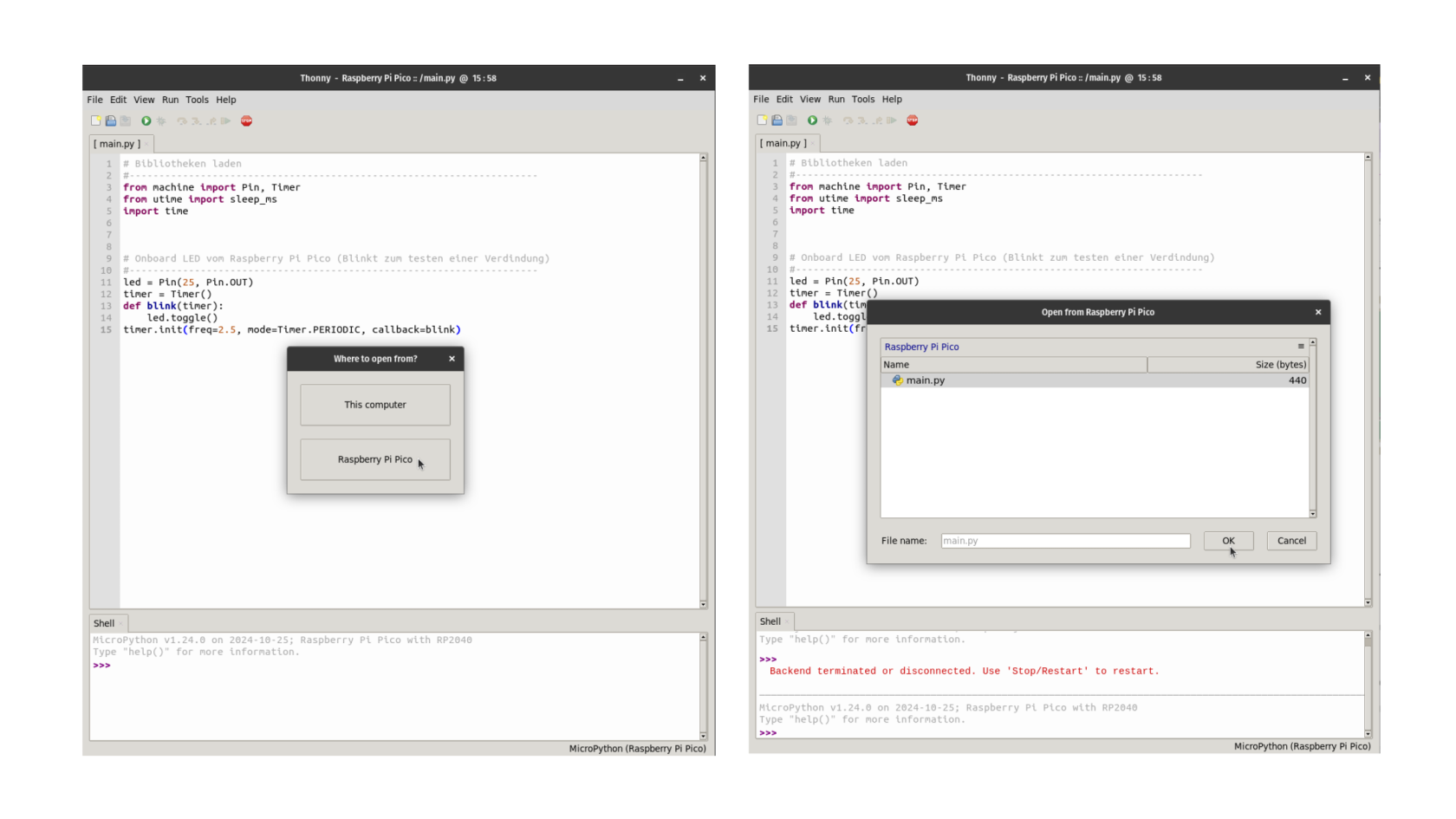
[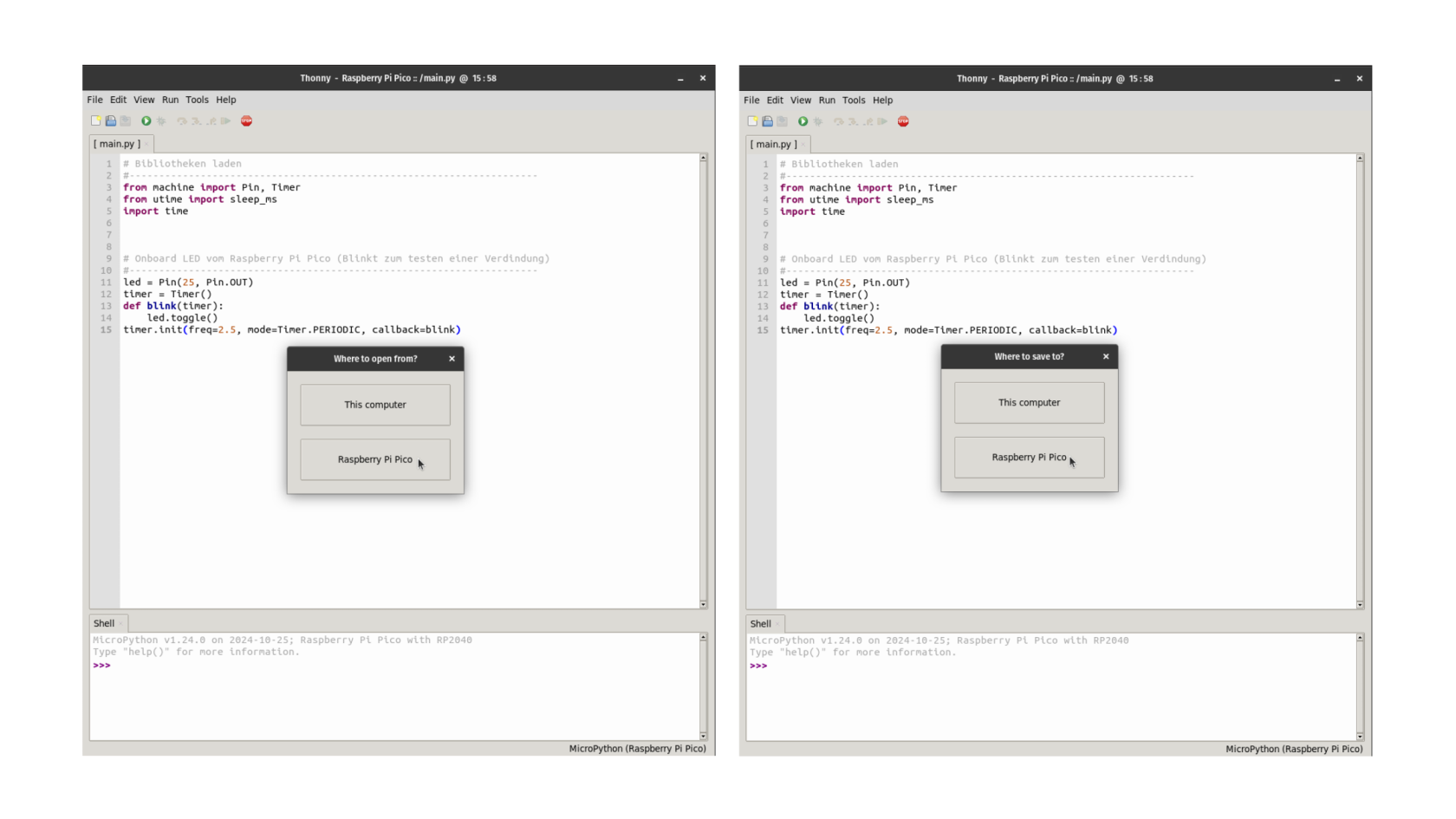](https://wiki.gestaltwasdigital.org/uploads/images/gallery/2024-11/thonny-open-save-pico-002.png)**Raspberry Pi Pico mit Thonny öffnen** Normalerweise kommuniziert Thonny automatisch mit dem Raspberry Pi Pico, sobald es angeschlossen ist. Wenn ihr Thonny geöffnet habt, geht wie folgt vor: 1. Wählt im Menü die Option **Dateien/Files** aus. 2. Im neuen Dialog könnt ihr das **Raspberry Pi Pico** als Speicherort auswählen. 3. Anschließend könnt ihr eure **main.py**-Datei auf dem Pico finden, auswählen und öffnen. So könnt ihr sicherstellen, dass euer Programm korrekt geladen und ausgeführt wird!Nachdem ihr eure **main.py** zum Öffnen ausgewählt habt, könnt ihr das Programm in Thonny bearbeiten. Wenn ihr Änderungen vornehmt und auf **Speichern** klickt, wird das Programm automatisch auf dem Raspberry Pi Pico aktualisiert und gespeichert. So bleiben eure Änderungen direkt auf dem Pico erhalten! ¯\\\_(ツ)\_/¯
[](https://wiki.gestaltwasdigital.org/uploads/images/gallery/2024-11/thonny-open-save-pico-003.png)**Programm starten/stoppen** Nachdem ihr ein Programm erfolgreich auf das Raspberry Pi Pico gespeichert oder übertragen habt, könnt ihr es ausführen und bei Bedarf stoppen: - **Starten:** Klickt in der Symbolleiste auf den runden **grünen Button**, um das Programm auf dem Raspberry Pi Pico zu starten. Alternativ könnt ihr die **Taste F5** drücken. - **Stoppen:** Klickt in der Symbolleiste auf den **roten Stop-Button**, um das Programm zu stoppen. Alternativ könnt ihr die Tastenkombination **Strg + F2** verwenden. **[](https://wiki.gestaltwasdigital.org/uploads/images/gallery/2024-11/thonny-pico-004.png)** # Zusammenbau Das Projekt hat vier Phasen, welche euch hier genauer beschrieben werden. [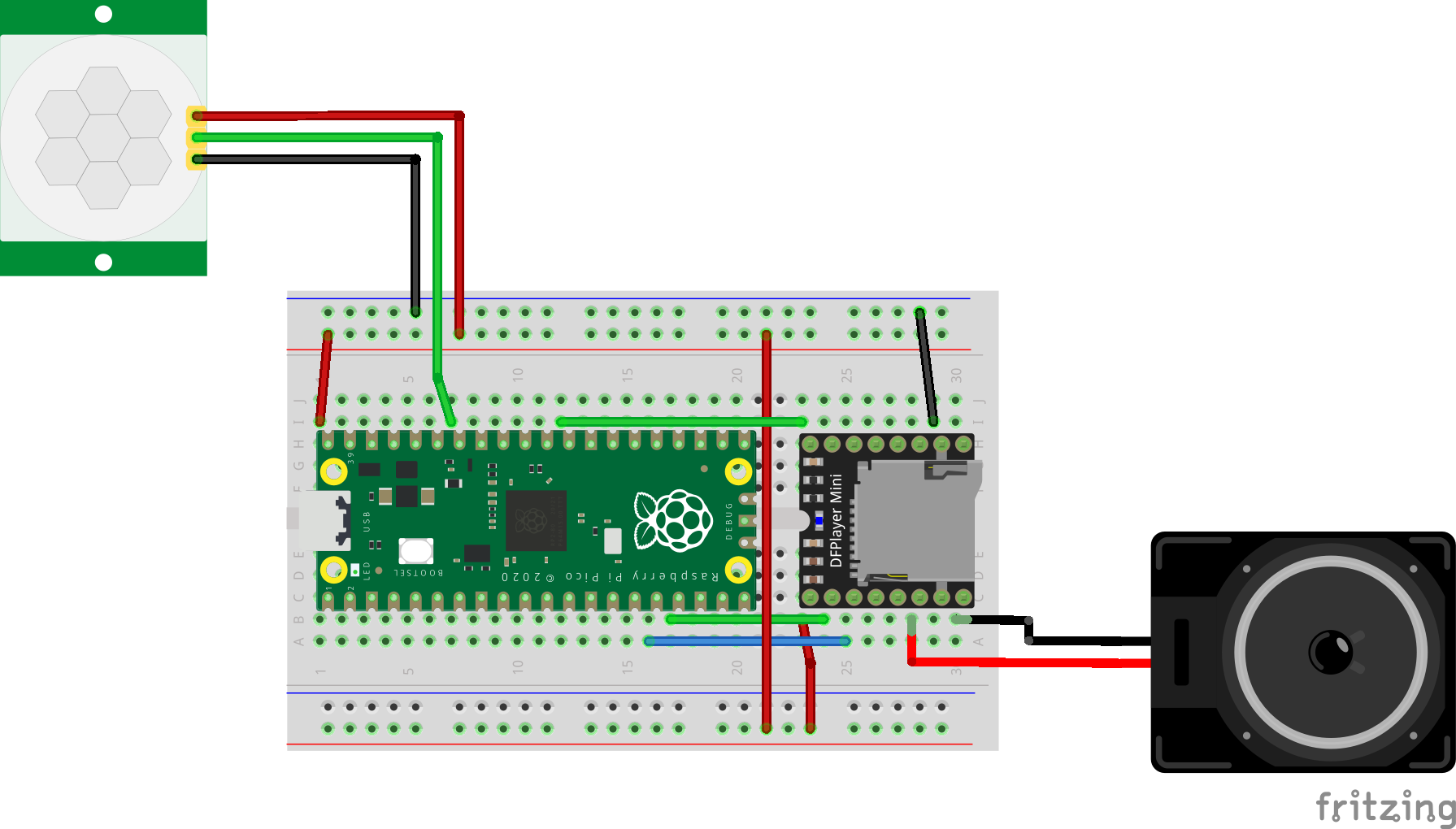](https://wiki.gestaltwasdigital.org/uploads/images/gallery/2024-11/McBzusammenbau-alarmanlage-002.png)**Beispiel-Verkabelung** (siehe Abbildung oben)**:** In der Abbildung werden rote, schwarze und grüne Kabel (Jumper) verwendet, die jeweils eine spezifische Funktion haben: - Rot (Power/PWR): Liefert Energie an das Bauteil, damit es funktioniert. - Schwarz (Ground/GRD): Schließt den Stromkreis und leitet überschüssige Energie ab. - Grün (Data): Überträgt die Daten zwischen dem Raspberry Pi Pico und dem Bauteil.
**1) Stromversorgung einrichten:** - Verbinde den **5V-Pin** des Raspberry Pi Pico mit der **positiven Leiste** (rote Linie) des Breadboards. - Verbinde einen **GND-Pin** des Raspberry Pi Pico mit der **negativen Leiste** (blaue Linie) des Breadboards. Jetzt können alle Bauteile auf dem Breadboard mit Strom versorgt werden. **2) Bewegungssensor anschließen:** - Stecke ein Jumper-Kabel vom **VCC-Pin** des Relaismoduls in die **positive Leiste** des Breadboards. - Verbinde den **GND-Pin** des Relaismoduls mit der **negativen Leiste** des Breadboards. - Schließe den **IN-Pin** des Relaismoduls mit einem Jumper-Kabel an den **GPIO-Pin GP28** des Raspberry Pi Pico an. **3) MP3 DFPlayer anschließen:** - Stecke ein Jumper-Kabel vom **VCC-Pin** des Relaismoduls in die **positive Leiste** des Breadboards. - Verbinde den **GND-Pin** des Relaismoduls mit der **negativen Leiste** des Breadboards. - Verbinden des **Busy-Pins** des DFPlayer mit **GPIO-Pin GB22** des Picos - **UART**-Konfiguration für DFPlayer - **TX-Pin** des DFPlayer mit dem **RX-Pin GB17** des Picos verbinden - **RX-Pin** des DFPlayer mit dem **TX-Pin GB16** des Picos verbinden**UART** steht für **"Universal Asynchronous Receiver Transmitter" (dt. Universeller asynchroner Empfängersender)**. Es ist eine Methode, mit der elektronische Geräte miteinander **kommunizieren** können, indem sie Daten seriell (also **nacheinander, Bit für Bit**) über zwei Drähte senden: einen zum Senden (**TX**) und einen zum Empfangen (**RX**).
Stell dir vor, **zwei Freunde** wollen miteinander sprechen, aber sie haben nur **eine Leitung**, über die sie abwechselnd sprechen können. Sie müssen sich einigen, **wie schnell** sie sprechen und **wann** sie anfangen und aufhören, damit sie sich verstehen.
**4) Lautsprecher anschießen:** - Der DFPlayer Mini verfügt über eingebaute Verstärker an den **Pins SPK\_1 und SPK\_2**, sodass du den Lautsprecher direkt ohne zusätzlichen Verstärker anschließen kannst. # Der Code Hier ist ein Beispielcode für eure Programmierung in Micropython in der IDE Thonny auf dem Raspberry Pi Pico. ```python import time import random from machine import Pin, UART from dfplayer import DFPlayer # HC-SR501 Bewegungsmelder pir_sensor = Pin(28, Pin.IN) # Verbinde den Bewegungsmelder mit Pin 28 # Onboard-LED des Raspberry Pi Pico led_pico = Pin(25, Pin.OUT) # Onboard-LED an Pin 25 # Busy-Pin des DFPlayer Mini busy_pin = Pin(22, Pin.IN) # Verbinde den Busy-Pin des DFPlayer mit Pin 22 # UART-Konfiguration für DFPlayer uart = UART(0, baudrate=9600, tx=Pin(16), rx=Pin(17)) # DFPlayer MP3 Player dfplayer = DFPlayer(uart_id=0, tx_pin_id=16, rx_pin_id=17) # Initialisiere DFPlayer mit UART Pins time.sleep(2) # Warte, bis der DFPlayer vollständig bereit ist # Setze die Lautstärke einmalig print("Setze Lautstärke...") dfplayer.volume(10) # Lautstärke auf 15 setzen (Bereich 0-30) time.sleep(0.5) # Funktion zum Abspielen einer zufälligen MP3-Datei def play_random_mp3(): track_number = random.randint(1, 4) # Wähle eine zufällige Datei im Bereich 001-004 time.sleep(0.2) # Kurze Pause nach der Zufallsauswahl print(f"Spiele MP3-Datei {track_number} ab...") dfplayer.play(1, track_number) # Spiele die Datei im Ordner ./01/ time.sleep(0.2) # Zusätzliche kurze Pause für Stabilität print("MP3-Wiedergabe gestartet.") # Hauptprogramm playing = False waiting_for_reset = False reset_timeout = 5 # Timeout für die Bewegungserkennung in Sekunden reset_start_time = 0 # Startzeit für das Timeout while True: # Prüfen, ob der Sensor keine Bewegung mehr meldet, bevor eine neue erkannt werden kann if not playing and not waiting_for_reset and pir_sensor.value() == 1: print("Bewegung erkannt!") led_pico.value(1) # LED einschalten play_random_mp3() playing = True # Setzt den Status auf "abspielend" if playing: # Überprüfe den Status des Busy-Pins und steuere die LED entsprechend if busy_pin.value() == 0: # Busy-Pin ist LOW, wenn eine Datei abgespielt wird print("DFPlayer spielt MP3-Datei ab.") else: print("DFPlayer ist im Leerlauf.") led_pico.value(0) # LED ausschalten playing = False # Wiedergabe ist abgeschlossen waiting_for_reset = True # Warte auf die Beendigung der Bewegungserkennung reset_start_time = time.time() # Startzeit für das Timeout setzen # Überprüfen, ob das Timeout abgelaufen ist oder der Sensor keine Bewegung mehr meldet if waiting_for_reset: if pir_sensor.value() == 0: print("Bereit für neue Bewegungserkennung.") waiting_for_reset = False elif time.time() - reset_start_time > reset_timeout: print("Timeout erreicht. Bereit für neue Bewegungserkennung.") waiting_for_reset = False time.sleep(0.1) # Kurze Pause, um Sensor nicht zu überlasten ``` # Online-Ressourcen /